Background
A key part of the SUP-1 RAVE project is creating representative datasets that mimic the capabilities of the upcoming Copernicus Expansion Missions (CEMs). These datasets will form the backbone of our planned application use cases, developed in collaboration with our rail management partners, Network Rail and SNCF Réseau. To build these representative datasets, we process data from existing satellite missions so that it reflects the expected characteristics of future CEM instruments. Our current focus is on two missions: the Copernicus Hyperspectral Imaging Mission for the Environment (CHIME), and the Radar Observing System for Europe in L-band (ROSE-L) synthetic aperture radar.
CHIME
To generate representative CHIME data we are using imagery acquired from the EnMap and PRISMA missions. EnMap is a German hyperspectral mission developed by the German Space Agency (DLR) and OHB Systems, launched in 2022. PRISMA is an Italian satellite designed by OHB Italia, Leonardo, and the Italian Space Agency (ASI); operating since 2019. EnMap and PRISMA have similar imaging characteristics, with a spatial resolution of 30 m, and 30 km swath, and spectral range between ~400–2500 nm. After launch, CHIME is expected to deliver comparable spectral coverage but with a much wider swath (~130 km), enabling more frequent repeat observations. Its exact spectral specifications are still to be finalised, but the Mission Requirements Document [1] provides an initial framework.
Our initial experiences with EnMap and PRISMA have been positive. Both data are available as Level 2 surface reflectance products, reducing the pre-processing time required. Visually all the data we have handled has been high-quality. Obtaining cloud-free images for the UK is a challenge, but both archives are continuously expanding, and offer tasking (subject to project approval). As noted in previous studies [2], PRISMA data often has a geolocation offset of around 5 pixels (~150 m). Fortunately, this can be corrected quickly using the open-source AROSICS software, developed by the GFZ.
 Figure 1: Emulated CHIME image showing the New Forest National Park and Southampton. Generated from a PRISMA image acquired 10-04-2020. Data generated by Airbus Defence & Space UK Ltd. under a license from ASI Original PRISMA Product - © Italian Space Agency (ASI; 2020).
Figure 1: Emulated CHIME image showing the New Forest National Park and Southampton. Generated from a PRISMA image acquired 10-04-2020. Data generated by Airbus Defence & Space UK Ltd. under a license from ASI Original PRISMA Product - © Italian Space Agency (ASI; 2020).
ROSE-L
For ROSE-L, we are using synthetic aperture radar imagery acquired by the Comisión Nacional de Actividades Espaciales’ (CONAE) SAOCOM-1A and SAOCOM-1B constellation of satellites, which were designed and manufactured by INVAP S.E in Argentina.
Similar to ROSE-L, SAOCOM-1A and SAOCOM-1B operate at L-band frequencies, enabling a greater degree of signal penetration over vegetated lineside environments relative to higher frequency radar sensors (e.g. C-band Sentinel-1). Since the launch of SAOCOM-1A and SAOCOM-1B in 2018 and 2020, respectively, repeat-pass imagery is acquired over most of Europe every 16 days (8 days in constellation), and imagery is provided (following successful project registration) via the Italian Space Agency (Agenzia Spaziale Italiana; ASI).
In terms of initial impressions, we deem the L-band imaging capabilities of SAOCOM-1A and SAOCOM-1B to be excellent. Consistent with SAR theory [3], this is especially true over heavily vegetated (woodland and hedged) regions viewed in cross-polarisation (HV, VH) mode (Figure 2), and across inundated regions where backscatter returns tend to be low due to specular reflection over standing water. Together, these findings are encouraging for the tree height-, flood detection- and other ROSE-L-enabled applications to be developed as part of the SUP1 RAVE project.
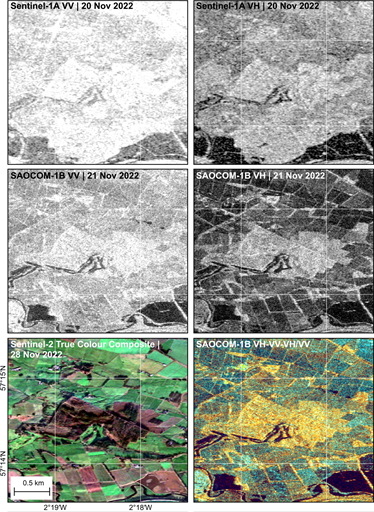 Figure 2: Emulated ROSE-L imagery over Balbithan Forest, Scotland, and comparison to C-band SAR. (top row), Sentinel-1A (C-band) VV and VH polarisation products dated 20th November 2022. (middle row), Emulated ROSE-L VV and VH polarisation products generated from a SAOCOM-1B acquisition dated 21st November 2022. Note the difference in dynamic range between Sentinel-1 and SAOCOM across both polarisation channels. (Lower right), RGB composite (VH-VV-VH/VV) emphasising sensitivity of cross-polarisation (VH) ROSE-L imagery to above-ground woody biomass (shown in yellow). (Lower left), Sentinel-2A true colour image dated 28th November 2022.
Figure 2: Emulated ROSE-L imagery over Balbithan Forest, Scotland, and comparison to C-band SAR. (top row), Sentinel-1A (C-band) VV and VH polarisation products dated 20th November 2022. (middle row), Emulated ROSE-L VV and VH polarisation products generated from a SAOCOM-1B acquisition dated 21st November 2022. Note the difference in dynamic range between Sentinel-1 and SAOCOM across both polarisation channels. (Lower right), RGB composite (VH-VV-VH/VV) emphasising sensitivity of cross-polarisation (VH) ROSE-L imagery to above-ground woody biomass (shown in yellow). (Lower left), Sentinel-2A true colour image dated 28th November 2022.
Next Steps
As alluded to above, our CHIME and ROSE-L representative datasets will next be used in a series of application use cases, testing their feasibility to support a range of rail infrastructure monitoring needs. All of the project outputs – including code, reports, and data – will be made available in due course via ESA, and the results of our studies will be published in academic journals and conference proceedings.
Document References
- ESA (2021) CHIME Mission Requirement Document https://esamultimedia.esa.int/docs/EarthObservation/Copernicus_CHIME_MRD_v3.0_Issued_21_01_2021.pdf
- De Luca, G., Carotenuto, F., Genesio, L., Pepe, M., Toscano, P., Boschetti, M., Miglietta, F. and Gioli, B., 2024. Improving PRISMA hyperspectral spatial resolution and geolocation by using Sentinel-2: development and test of an operational procedure in urban and rural areas. ISPRS Journal of Photogrammetry and Remote Sensing, 215, pp.112-135.
- CEOS (2023) https://ceos.org/ard/files/Laymans_SAR_Interpretation_Guide_3.0.pdf
